汎用グラフィカルモデリング言語「SysML」 パート2:グラフィカルなモデル言語で製品構造を記述:The Rational Edge(2/2 ページ)
制約条件を使った属性間の関係の定義
筆者はここまでで、物理特性を示す目的でブロックの属性を定義する方法を解説してきた。一連のシステムの属性は独立していない場合が多い。AとBの2つのサブシステムが、それぞれaとbという属性を持っており、{A.a > B.b}が真でなくてはならない制約条件があるとする。SysMLの「ConstraintBlock」は、エンジニアがシステム属性のどのような関係(例:解析的なものなど)でも定義できるようにする。一般的には、これらの制約条件から要件検証などのシミュレーションで活用できる表現網が生まれる。ただし、後述するように、Constraintブロックがランタイムオブジェクトとしてインスタンス化できず、ブロックの特殊なプロパティの分類に使用されることに注意したい。
制約条件とは、サブシステムの中にある「ConstraintProperty」という名前のプロパティ(つまり、ブロック) で、ConstraintBlockで分類される。そして、Constraintブロックはそのパラメータを示す表現と属性を定義している。SysMLでは、どの特定の言語による表現の説明も、それらに対するソルバーの提供も義務付けていない。これらのエレメントは、特定のツールベンダが提供するのが一般的だ。
RSWは一連の解析制約条件を使い、システムが適切に調整されているかどうか検証する。図10に3つの制約条件を示す。
- 「SensorEffectiveRange」の制約条件は、一部のパラメータに基づいて赤外線センサーの作動範囲を計算する
- 同様に、「WindshieldIREffectiveRange」制約条件は、フロントガラス用の作動範囲を計算するが、これをセンサー用に計算された値と比較することもできる
- 「SensorWindshieldRangeCompare」の制約条件は、これらの値の比較に使用する
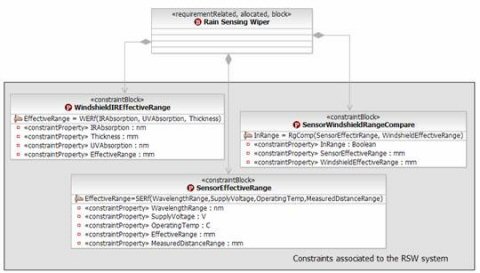 図10 雨滴検知ワイパーシステムのConstraintブロックの定義 (
図10 雨滴検知ワイパーシステムのConstraintブロックの定義 (SysML Parametric Diagram(PD)は、「ConstraintProperties」としてのConstraintブロックの使い方を表すために使用される。PDは、文法上は実際にはIBDと同じだ。PDでは、使用方法を示すConstraintブロックの中で定義されたパラメータを通じ、Constraint Propertiesが相互接続されている。そして、保有ブロックに関連付けてほかのプロパティ(ブロックプロパティや分散プロパティなど)に接続する。これらのプロパティは、パラメータの入力にしかなれないため、Constraint Propertiesのパラメータと直接結び付けられる。
図11にPDの例を示す。Constraint Propertiesは、丸い角の四角で示されている。この図では、センサーとフロントガラスの両方のパーツが作動範囲を計算し、これが「compare」プロパティで比較される。これらの値はほかにも、コンフィギュレーションファイルを示すパーツに対して提供される(図11の最下部)。もしセンサーとフロントガラスに互換性がある場合は、IsCalibrated(ポートとして見える)のフラグが真になる。従って、補正要件の検証は、このポートの値のテストだけになる。そのため、システムはフロントガラスやセンサーの特性の変化に素早く対応できるようになる。
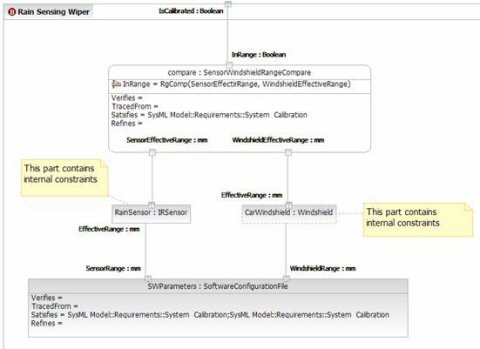 図11 雨滴検知ワイパーシステムのパラメータダイヤグラム (
図11 雨滴検知ワイパーシステムのパラメータダイヤグラム (要件アロケーションはコンパートメントを使ってPDで示されている。図11には、比較に使う制約条件と、コンフィギュレーションファイルを示すパーツの両方に要件アロケーションのコンパートメントが示されている。この例では、これらのエレメントがSystem Calibration要件を満たしている。
「WindshieldIREffectiveRange」および「SensorEffectiveRange」の両Constraintブロックの使用方法は、付録のダイヤグラムに用意されている。これらは「RainSensor」や「CarWindshield」というパーツごとにネスティングされる。パート1の図5にあるテストケースを部分的にインプリメントする際に図11のダイヤグラムが使われることに注意したい。
Constraintブロックが魅力的なのは、これらが再利用可能なメカニズムを使って制約条件のタイプを定義する点だ。従って、1つのモデルの中で何度も同じ制約条件を使うことができる。制約条件は、どの変数が入力で、どれが出力なのかを明記しないことをぜひ覚えておきたい。値はコンテキストで割り当てられ、数値ソルバーがシステム変数の結果を提供する。SysMLの制約条件については、ぜひともPeak博士などの功績を調べておきたい[注2]。
パート2ではSysMLを使って製品構造を作成し、それに要件をアロケートする方法について解説した。最後となるパート3では、SysMLでシステムの動作特性をモデリングするための機能を概説する。
- トランザクション管理の複雑性を克服する(パート1)
- アジャイルとシステムテストの新たな関係(後編)
- アジャイルとシステムテストの新たな関係(前編)
- アジャイル開発の広範な普及を目指して
- 見積もりの精度 Accuracy of Estimation
- 複雑性を理解する(後編):ソフトウェアの複雑性を手なずける
- 複雑性を理解する(前編):ソフトウェアが複雑なのは仕方がない?
- 鈍重な開発チームは鈍重なシステムを作る?/パート3:役割とポリシー(後編)
- 人事評価と開発者のモチベーション/パート3:役割とポリシー(中編)
- 自己管理型チームの利点と弱点/パート3:役割とポリシー(前編)
- プロセスはチャンスが訪れるたびに改善する/パート2:プロセスと基準(後編)
- 開発プロセス導入のアンチパターン/パート2:プロセスと基準(中編)
- 反復開発の「ここはぜひカバーしたいポイント」/パート2:プロセスと基準(前編)
- 開発プロジェクト「統治」のピンポイント解説/パート1:原則と組織(後編)
- 開発プロジェクトを「統治」するベストプラクティス/パート1:原則と組織(前編)
- 初歩の「Perl」「Python」「Ruby」
- ビルドが全滅する原因/プロジェクトの状態を評価する:パート2(後編)
- 不完全なコードは推敲フェイズで潰しておきたい/プロジェクトの状態を評価する:パート2(前編)
- UMLを使ったビジネスモデリング(後編):そうだったのか! システムユースケース
- UMLを使ったビジネスモデリング(前編):なるほど! ビジネスユースケース
- 「この開発プロジェクトは中止!」の基準/プロジェクトの状態を評価する:パート1(後編)
- プロジェクトのはじめに計画を立てるのは無謀/プロジェクトの状態を評価する:パート1(前編)
- 専門家に聞くモデル駆動開発のメカニズム
- 「設計」や「構築」よりも重宝されるスキル
- キミのコードが汚い理由
- 汎用グラフィカルモデリング言語「SysML」 パート2:グラフィカルなモデル言語で製品構造を記述
- 汎用グラフィカルモデリング言語「SysML」 パート1: 要件、ユースケース、およびテストケースのモデリング
- ウォーターフォールから反復型への移行手順
- ソフトウェアアーキテクティングのメリット
- ソフトウェアアーキテクティングのプロセス
- ソフトウェアアーキテクトの役割
- ソフトウェアアーキテクチャって何なの?(後編)
- ソフトウェアアーキテクチャって何なの?(前編)
- ITプロジェクトを見える化する
- ユーザー要件を引出すテクニック: ユースケースかストーリーボードか
- オブジェクト指向を超えて
- ルネサンスの巨匠たちに学ぶエンジニアリングの技
- ソフトウェア開発の「いま」と「近未来」の話
- 中国のソフトウェア開発現場はこんなにスゴイ
- 隣のテストチームが優秀ないくつかの理由(後編)
- 隣のテストチームが優秀ないくつかの理由(前編)
Copyright © ITmedia, Inc. All Rights Reserved.
注目のテーマ




人気記事ランキング
- 生成AIは検索エンジンではない 当たり前のようで、意識すると変わること
- VPNやSSHを狙ったブルートフォース攻撃が増加中 対象となる製品は?
- 大田区役所、2023年に発生したシステム障害の全貌を報告 NECとの和解の経緯
- “脱Windows”が無理なら挑まざるを得ない「Windows 11移行」実践ガイド
- ランサムウェアに通用しない“名ばかりバックアップ”になっていませんか?
- 標的型メール訓練あるある「全然定着しない」をHENNGEはどう解消するのか?
- HOYAに1000万ドル要求か サイバー犯罪グループの関与を仏メディアが報道
- 爆売れだった「ノートPC」が早くも旧世代の現実
- 「Gemini」でBigQuery、Lookerはどう変わる? 新機能の詳細と利用方法
- 攻撃者が日本で最も悪用しているアプリは何か? 最新調査から見えた傾向
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。