PCのUIへの応用も
指の動きを滑らかに模倣するロボットハンド
2007/09/12
ダンスや武術の演武など、人間の動きをカメラで捉えてデータ化するモーションキャプチャーは一般的だが、これまで指の動きを正確に認識できる技術は存在しなかった。指の動きがあまりに複雑で速すぎるからだ。カメラの死角となって見えない部分についても処理が難しい。こうした問題をクリアし、毎秒150フレームという高速処理で人間の動きを滑らかに模倣できるロボットハンドが登場した。
人間の手の動きを模倣するロボットハンド
データベースを最適化してリアルタイム処理を実現
筑波大学大学院システム情報工学研究科で医用生体工学を研究する星野聖准教授は、東京国際フォーラムで開催中の「イノベーション・ジャパン2007―大学見本市」の展示会場で、デモンストレーションを交えながら最新の「ロボットハンド」を解説している。
 指の動きを滑らかに模倣するロボットハンドのデモンストレーション。高速カメラで捉えた映像を、一般的なPCでリアルタイムで処理し、指の位置などを認識する
指の動きを滑らかに模倣するロボットハンドのデモンストレーション。高速カメラで捉えた映像を、一般的なPCでリアルタイムで処理し、指の位置などを認識する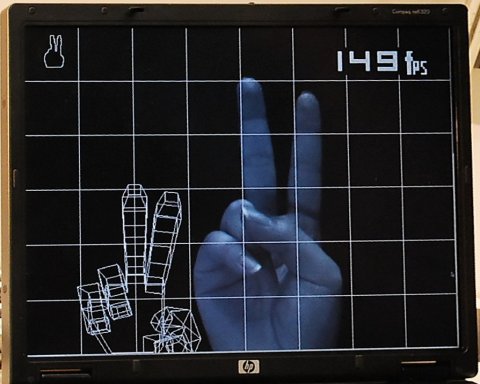 指の位置は外形、指の爪などを見て認識する
指の位置は外形、指の爪などを見て認識するデモンストレーションでは、高速カメラを用いて手の動きを撮影。一般的な処理性能のPCで、映像から指の位置を推定してロボットハンドに反映させている。ロボットハンドの動きには、かすかにタイムラグはあるが動き自体は非常に滑らかだ。
PC上での認識処理は高速だ。カメラ映像から手の外形、爪の位置などを把握して、データベースとマッチングする。あらかじめ用意したデータベースには1000程度のパターンが登録されている。手首の回転に対応する場合、パターンの数は数倍になる。
高速化のポイントはパターンをクラスター化して検索対象となるパターン数を大幅に減らせたこと。指の動きは連続的であるため1000個のパターンは、いくつかのパターンを最上位に持つグループに分けられるという。
適用可能な応用分野については未知数だ。星野准教授は、ロボットに手話を学ばせる、PCのOSや操作で「つかむ」「握る」などの実際の手による操作をインターフェイスに採り入れるなどが可能と話す。100Hzを超える高い周波数を実現できたことで、PID制御など高速なフィードバック処理が必要な工学用途でも適用できるだろうという。現状では、ほかの指などに重なって見えない指を、どう認識するかなど課題も残る。「見えない部分までデータ化できれば、陶芸工など匠の技をアーカイブ化することもできる」(星野准教授)など、これまでになかった応用が登場しそうだ。
関連リンク
関連記事
情報をお寄せください:
最新記事
|
|

